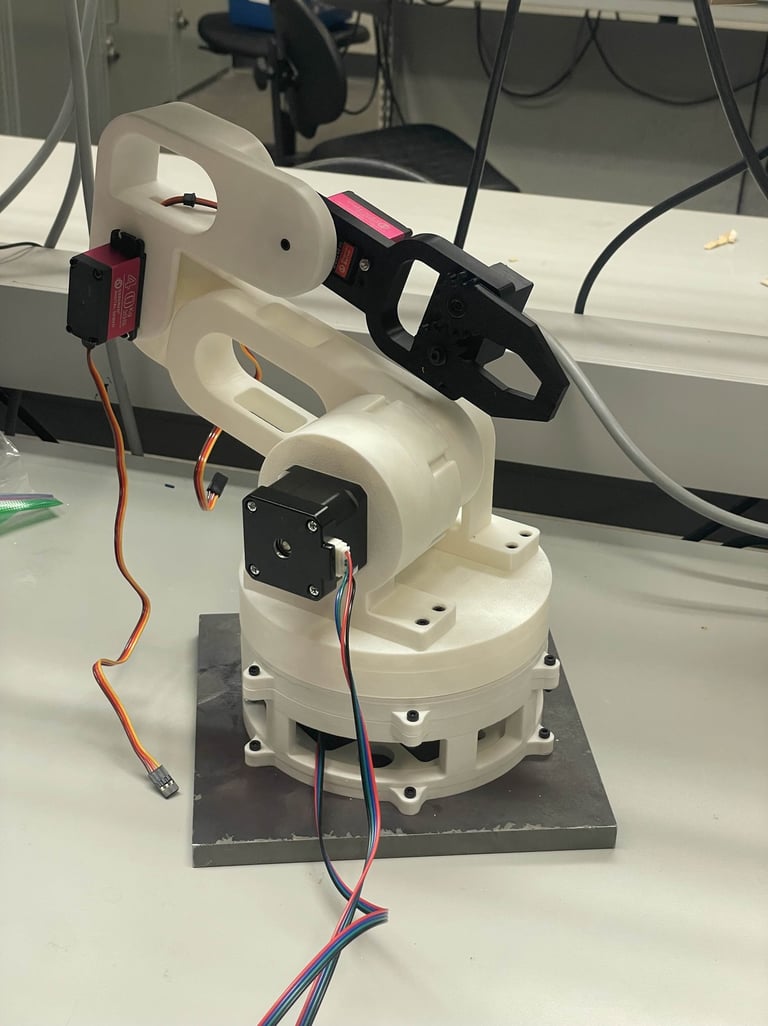
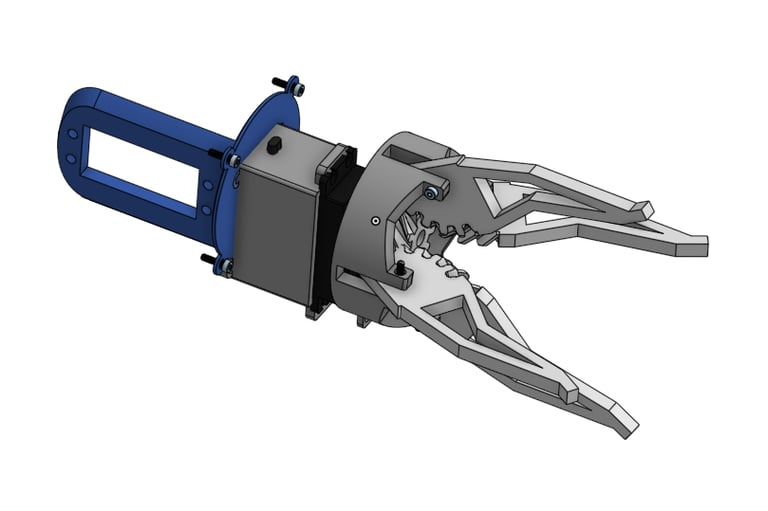
4 Degrees of Freedom Robot Arm
This project was done for ME380 as a group project.
Project Summary
Major contributions:
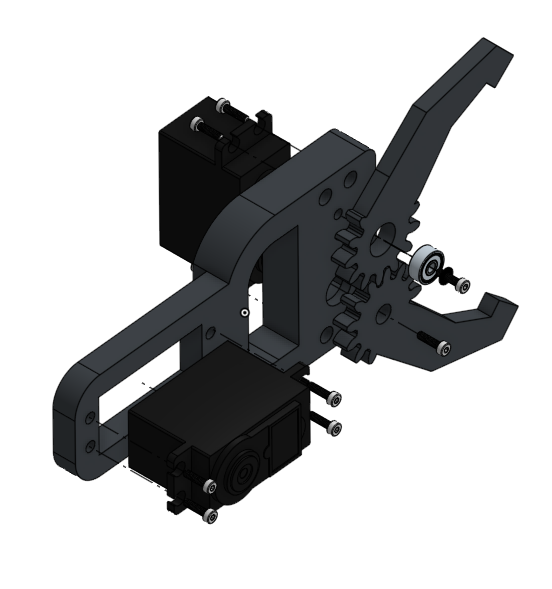
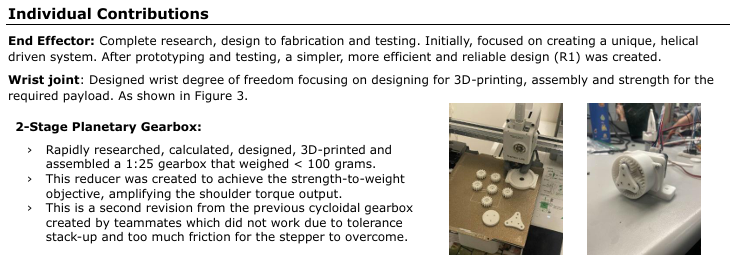
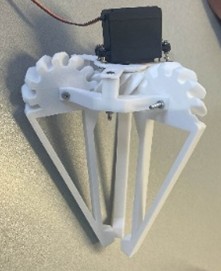
End Effector (Claw) Design and Controls
'Wrist' Joint Design
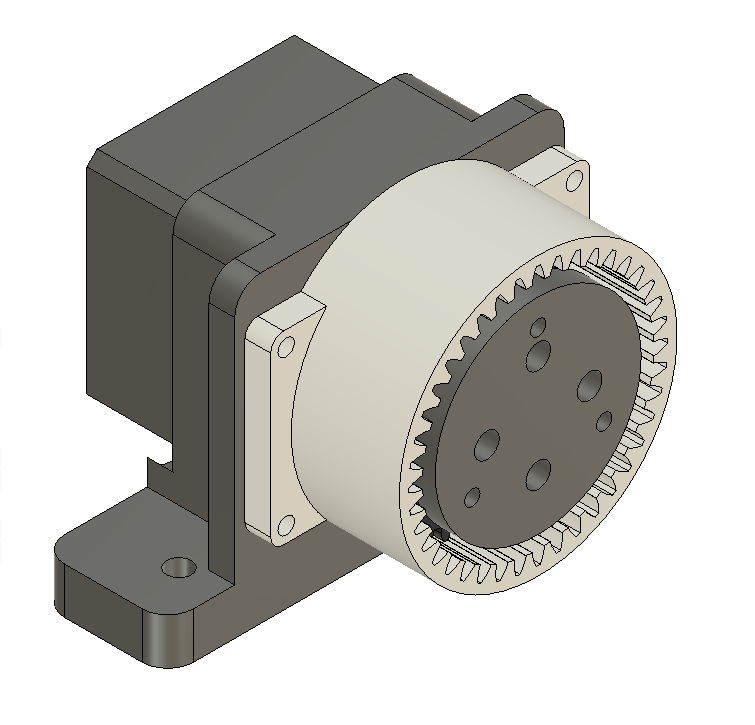
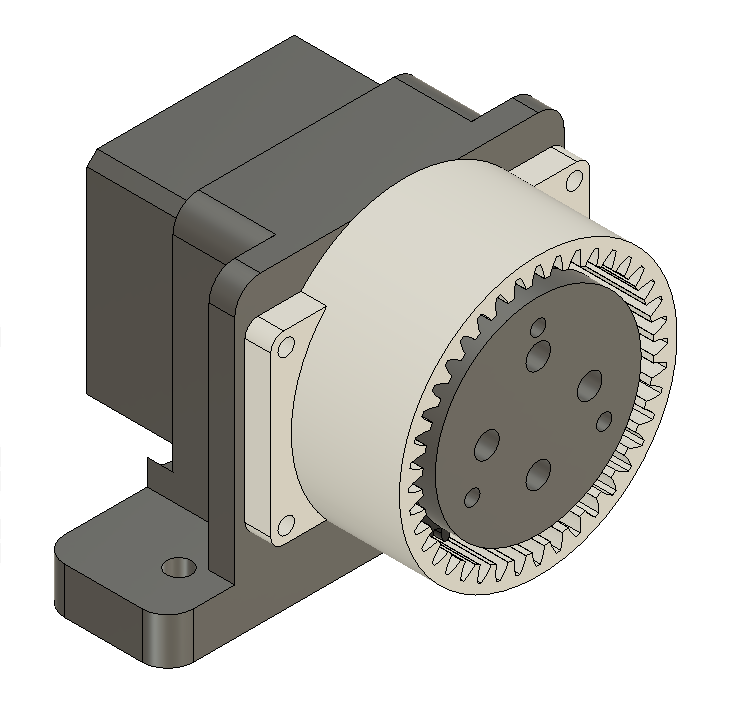
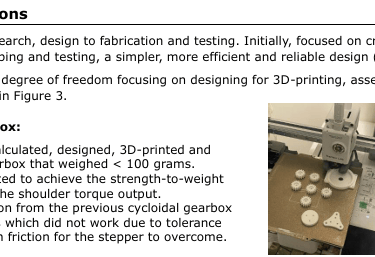
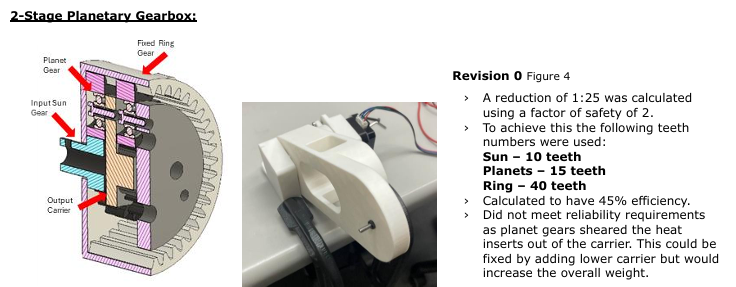
Planetary Gearbox 1:25
General specifications:
Overall Weight: 1.3kg
Strength to Weight: 1:3 (33%)
Workable Area: 400mm^2
Cost: ~$150
Background and Requirements
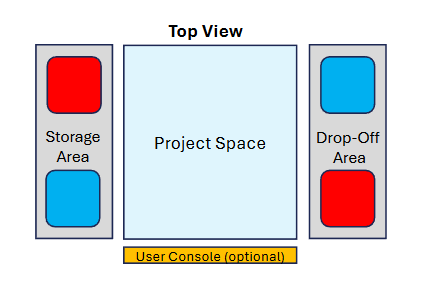
At a high level - the goal of the project is to move a 3D printed Benchy from one position to another in a unique way.
Some of the requirements the robot arm needs to meet based on research, timeframe, feasibility and cost:
4 Degrees of Freedom
Strength-to-weight ratio of 1:3 (33%)
Reach objects up to 400mm away
Reliably operate with a tolerance of 2cm
Overall budget of $200
These requirements are important to consider when designing every component of the robot.
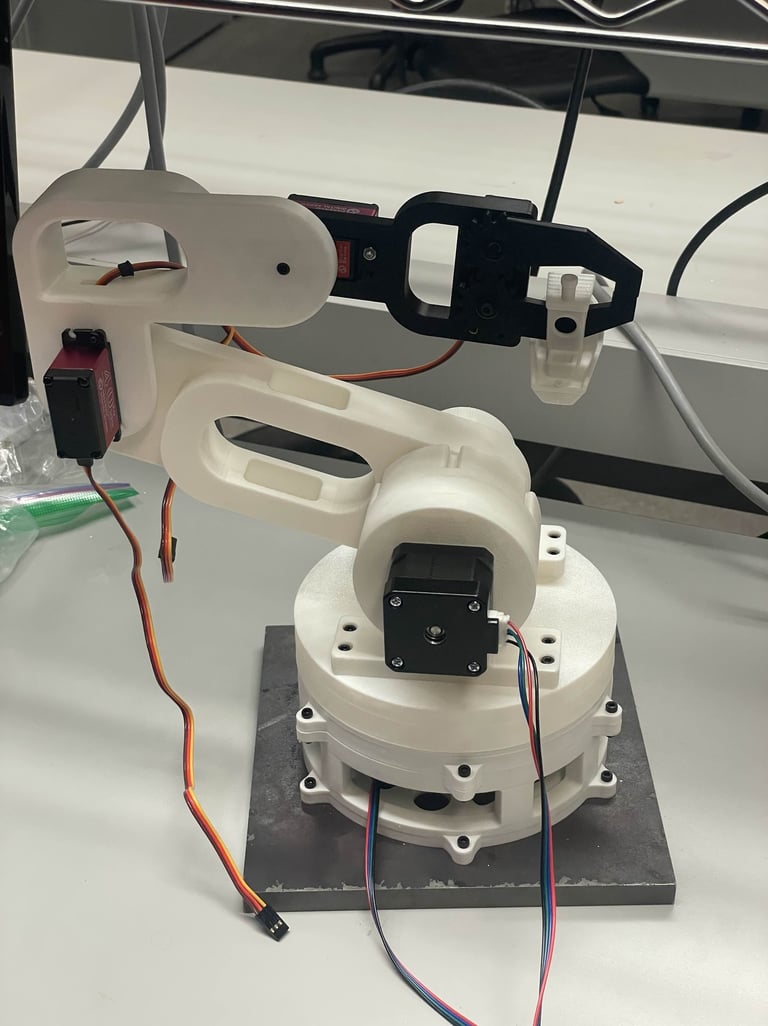
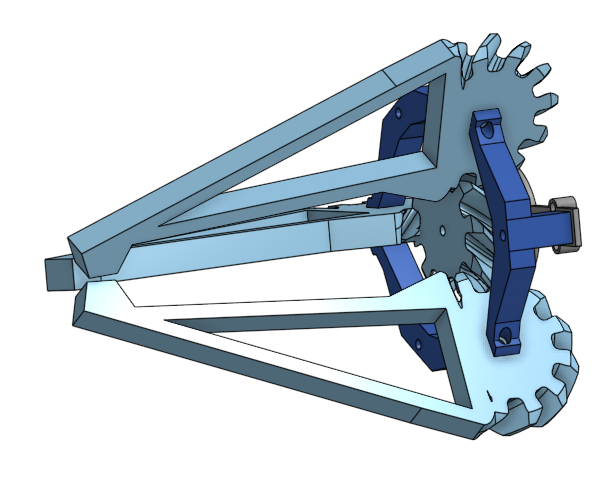
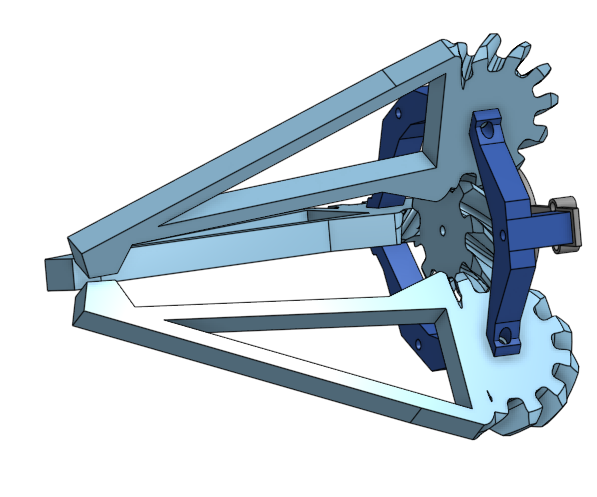
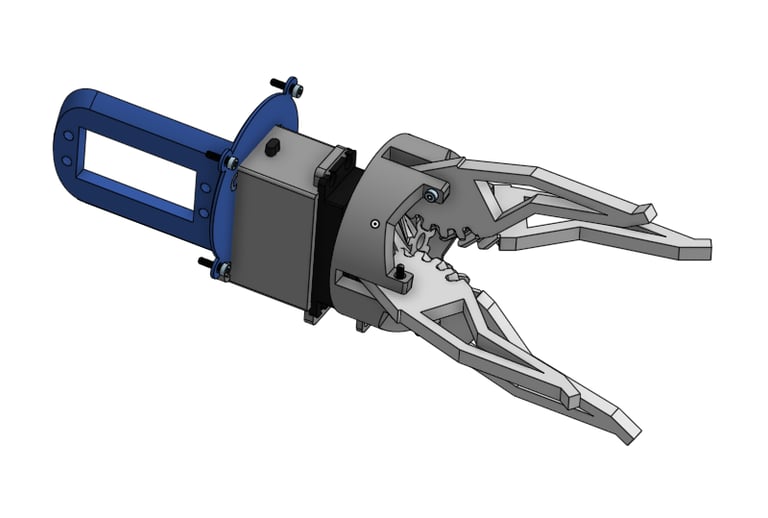
End Effector Design Process
The goal was to create a claw that could pick up and place a Benchy, operate on a single servo and operate reliably. This design and each revision was completed using Onshape due to its convenient gear generating software.
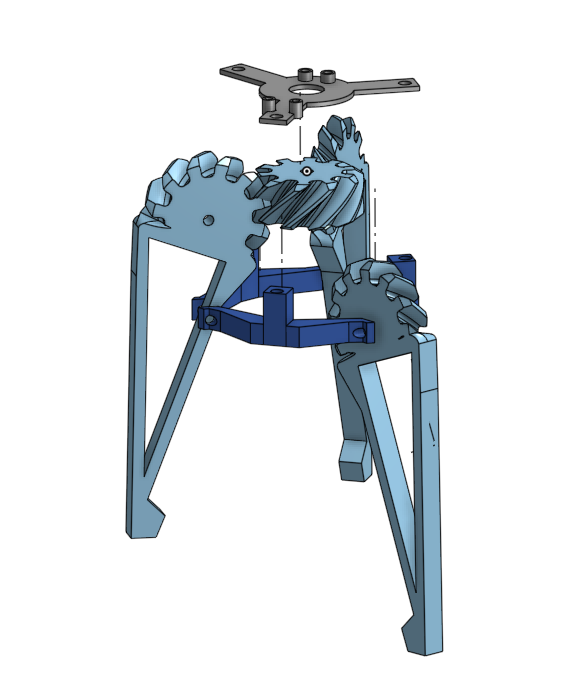
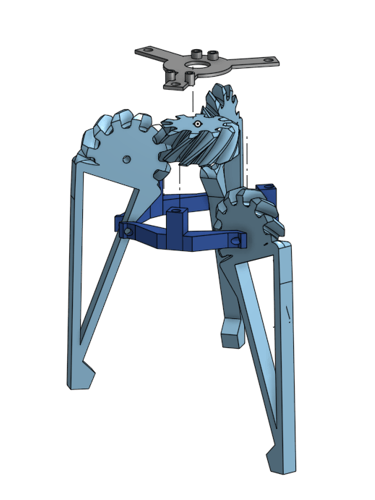
Revision 1
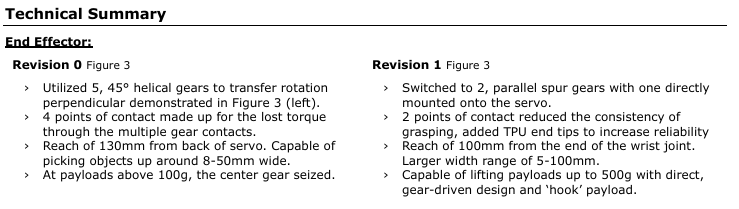
Utilized 45-degree helical gears to transfer power from the servo to the claw.


Concept Testing, Intial Design and Rapid Prototypes
Contact Me
Who am I?
I am a 4th year undergraduate student at the University of Waterloo pursuing a degree in Mechanical Engineering.
I chose this profession to pursue my passion of applying science and math to solve real-life problems. From robotics to nuclear welding and automation, I have a wide variety of experiences through my internships and personal projects
Outside of engineering, I love camping, sports, and cooking—more about my outside-engineering life below.